格安地磁気センサBM1422GMVによる地磁気計記録の紹介.Y.Okamoto 2024-05-18, updated on 2024-07-16
Preliminary report of magnetometer recordings with the BM1422GMV low-cost geomagnetic sensor
今回新たな地磁気センサを用いた地磁気計の製作と観測記事を分離しました.
まず最初に製作記事です.
We
have separated the making and observation parts of the geomagnetometer
using the new geomagnetic sensor BM1422GMV from the previous article..
First of all, here is the fabrication part.
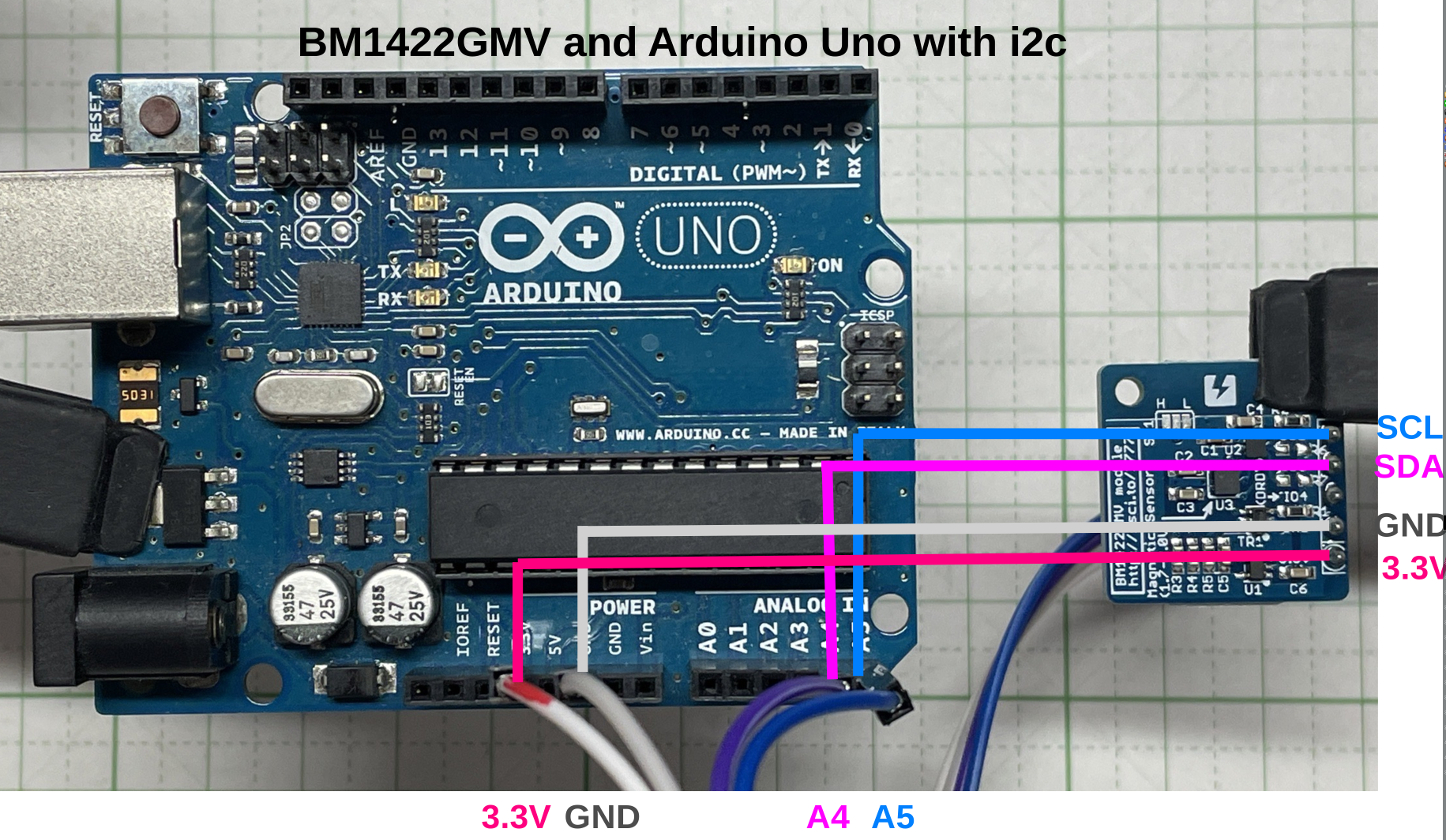
The sensor and an Arduino Uno are connected with the i2c protocol. The details of this sensor are as follows,
https://www.rohm.co.jp/sensor-shield-support/bm1422agmv
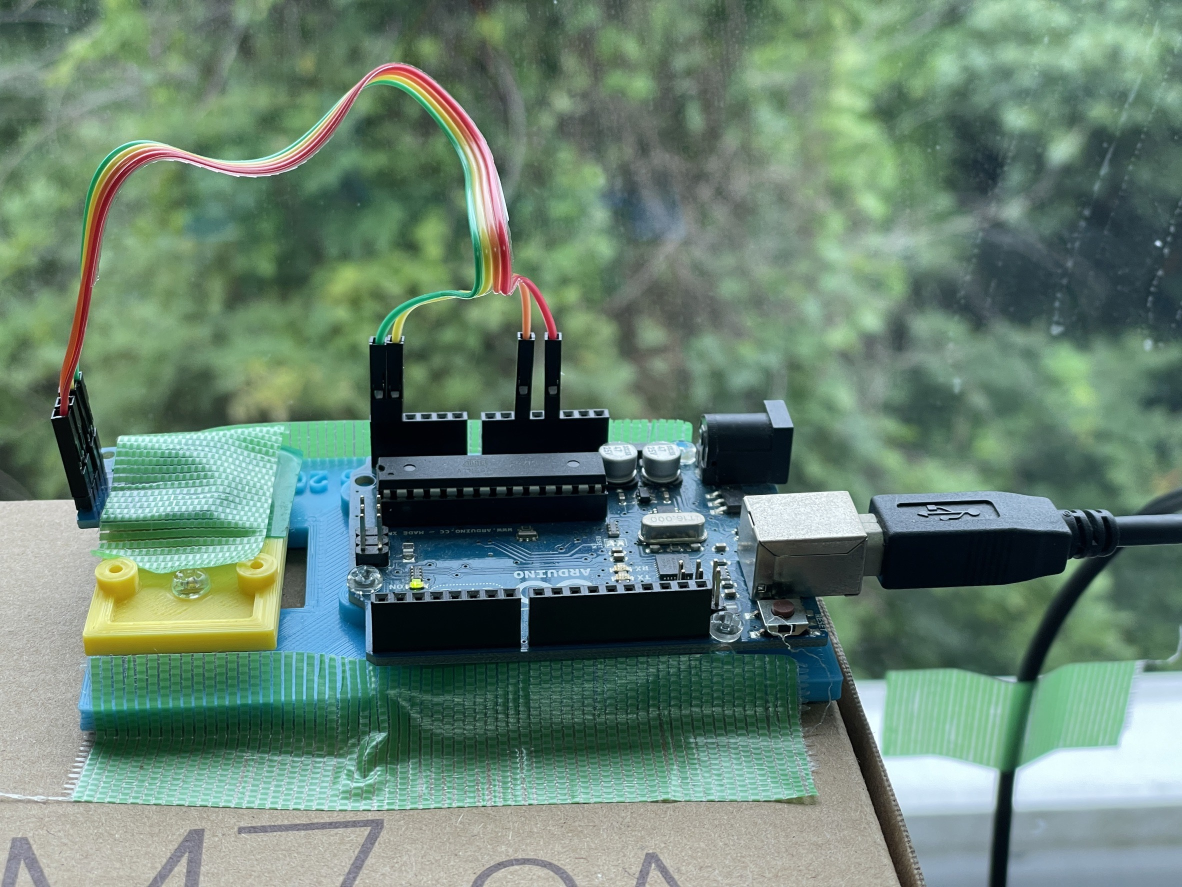
The sensor at an office of Taisei Gakuin University for avoiding train noises of my house.
I am appreciated Ms.H Nishiguchi for providing me her office for our observation.
The connecting circuits are as follows,
The software for ArduinoIDE can be downloaded at
https://micro.rohm.com/jp/download_support/sensor_module/kiyaku.php
An easy way to get data is the use of cu command on Linux PC like this. However you should install cu command with apt-get.
cu -s 9600 -l /dev/ttyACM0 | awk '{ print strftime("%Y-%m-%d %H:%M:%S"), $0 }' > logfile
(/dev/ttyACM0 should be adjusted on your PC)
The details of this command line options with time stamps, you can find the following page,
http://seagull.stars.ne.jp/Magnetometer/timestamp.html
The difference between my home and TGU(Taisei Gakuin University). My home records are the following previous data.
The records at my new observation site of TGU is as follows,
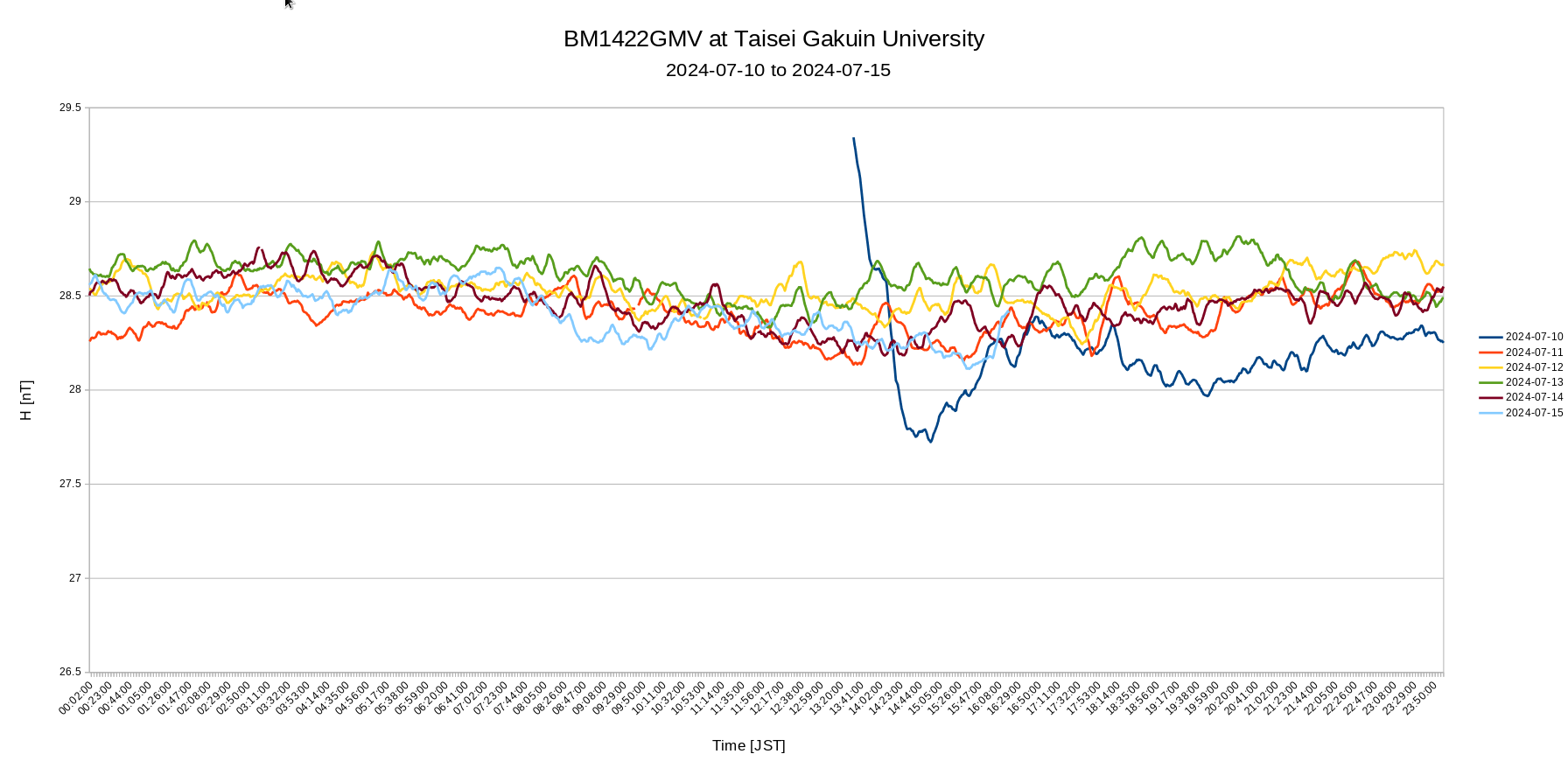
TGU office at Sakai Mihara campus. Some moderate noises are seen. But we
have no idea about these noises. Because at this site, we have no high-voltage lines and traffics or trains.
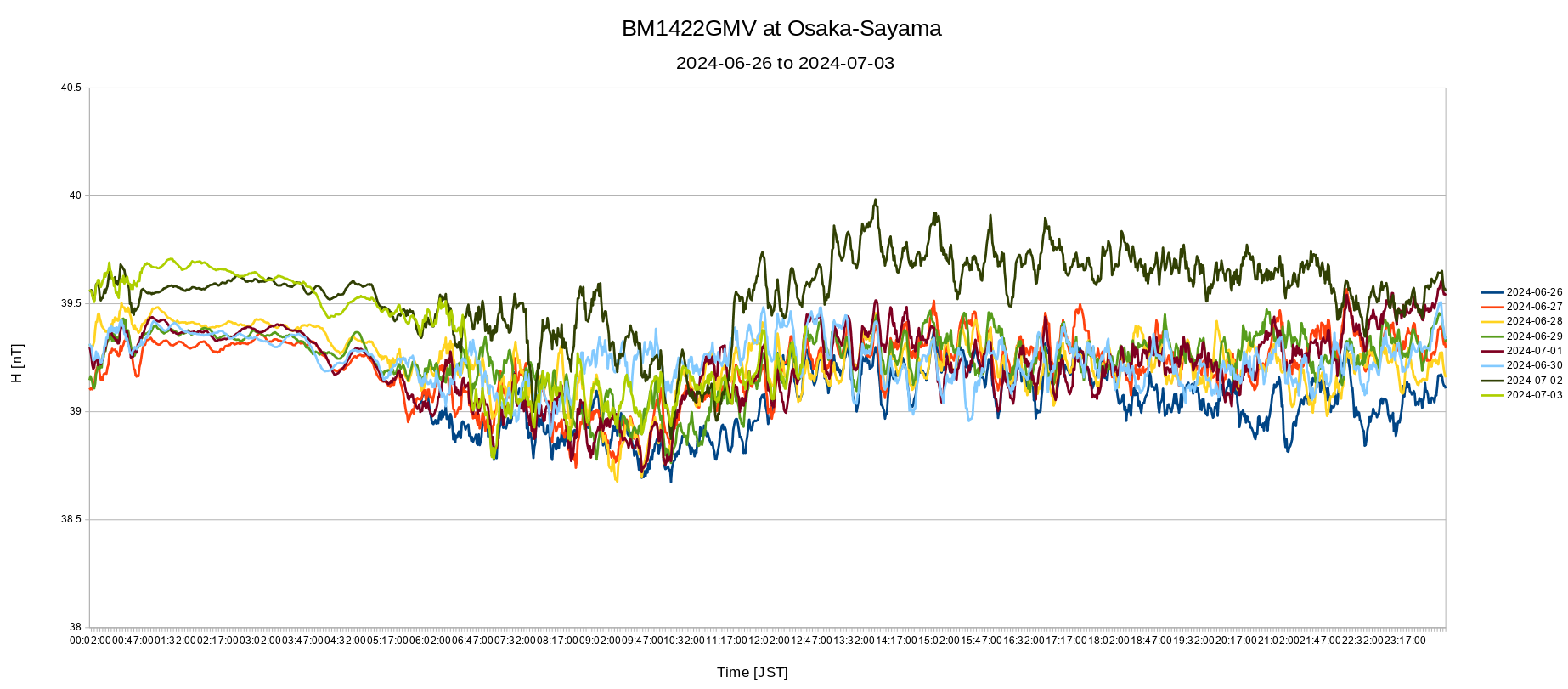
My
home at Osaka-Sayama city beside the Nankai Koya railroad. Most of
noises are from the rail road signals and passing trains about 40m apart
from. We can see the coincide signals by running trains on time on week
days. You can see calm periods in the midnight to early morning because
of no trains.
New daily data are uploaded at the folloewing pages on 2024-05-24;
http://seagull.stars.ne.jp/Magnetometer/BM1422GMV/daily_record1.html
前回の地磁気計はチープではあるものの,センサ特性に不安があるのと,本来の純正品ではないのでセンサを別のものに換えた.今回用いたのはROHM社生産で日本ではスイッチサイエンスで入手できるBM1422GMV
という地磁気センサを用いた.価格は送料を除いて2000円ほどである.このセンサはデータシートも完備され,出力単位も[uT](マイクロテスラ)であ
ると仕様書に明記されている.Arduino基板との接続もi2cで前回のセンサと同様に簡単にできる.さらにROHM社のWebサイトからダウンロード
したテスト用のプログラムをArduinoIDEにロードすることで,容易にデータをPCをに取り込むことが可能となる.
Although
the previous magneto-sensor is cheap, I replaced it with another one
because I was not sure about the sensor characteristics and because it
is not a Honeywell geomagnetic sensor. This time, I used a magneto-sensor named BM1422GMV, which is manufactured by ROHM and available from Switch Science in Japan. The price was about 2000 yen, excluding shipping costs. The
sensor has a complete datasheet, and the output unit is specified as
[uT] (MicroTesla). i2c connection to the Arduino board is easy, just
like the previous sensor. In
addition, by downloading the test program from the ROHM website and
loading it into ArduinoIDE, data can be easily imported into a PC via
Serial com. software.
こ
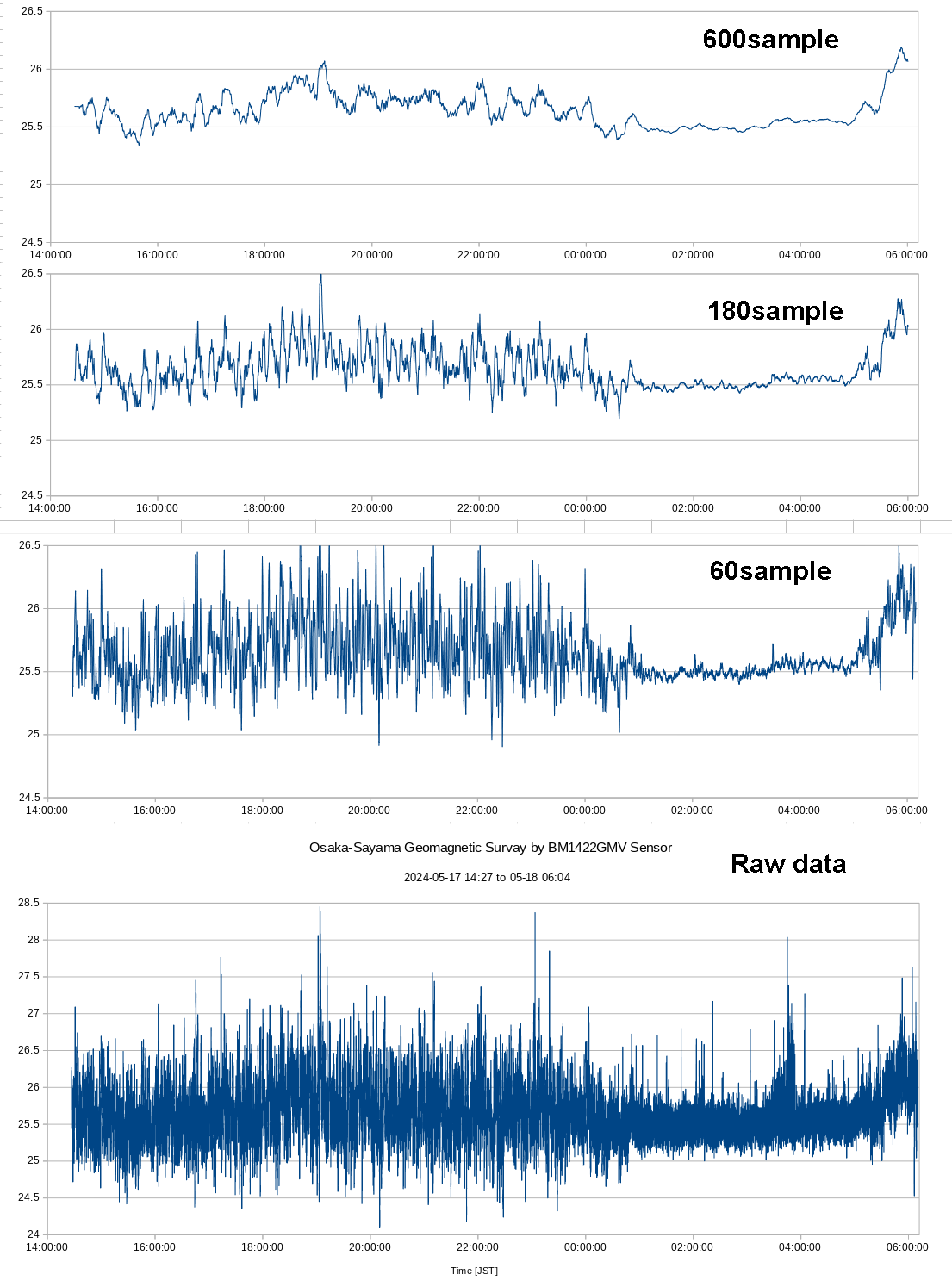
ちらが昨日午後から今朝までの15時間あまりの記録.一番下が生のデータ.上が順に移動平均のサンプル数を増やしたもの.順に1分,3分,10分の窓を掛
けた移動平均(ローパス)計算処理になる.これをみると一番上のものでは,1日の変動幅は例外を除いて50uTに収まっている.これは柿岡の地磁気データ
とほぼ同じレベル.ただし波形は異なる.やはり人工的な磁場の影響が強い.それでも特筆すべきは,前回のセンサと同様,夜は午前0時すぎにノイズが収ま
り,朝5時すぎから再びノイズが出てきているところ.昼間の振動の様子は移動平均のレベルにより若干異なってみえる.これで次の磁気嵐を待ちたいところ.
This is a 15-hour record from yesterday afternoon to this morning. The bottom is the raw data. The top is the moving average with the number of samples increased in ascendig order. There are a moving average (low-pass) calculation with 1-minute, 3-minute, and 10-minute windows, in ascending order. The top one shows that the daily fluctuation range is within 50 uT with some exceptions. This is almost the same level as the Kakioka geomagnetic data. However, the waveform is different. The influence of the artificial magnetic field is still strong. Still,
it should be noted that, as with the previous sensor, the noise
subsides after midnight at night and reappears after 5:00 a.m. The oscillations during the daytime appear to be slightly different depending on the moving average level. We are waiting for the next big magnetic storm.
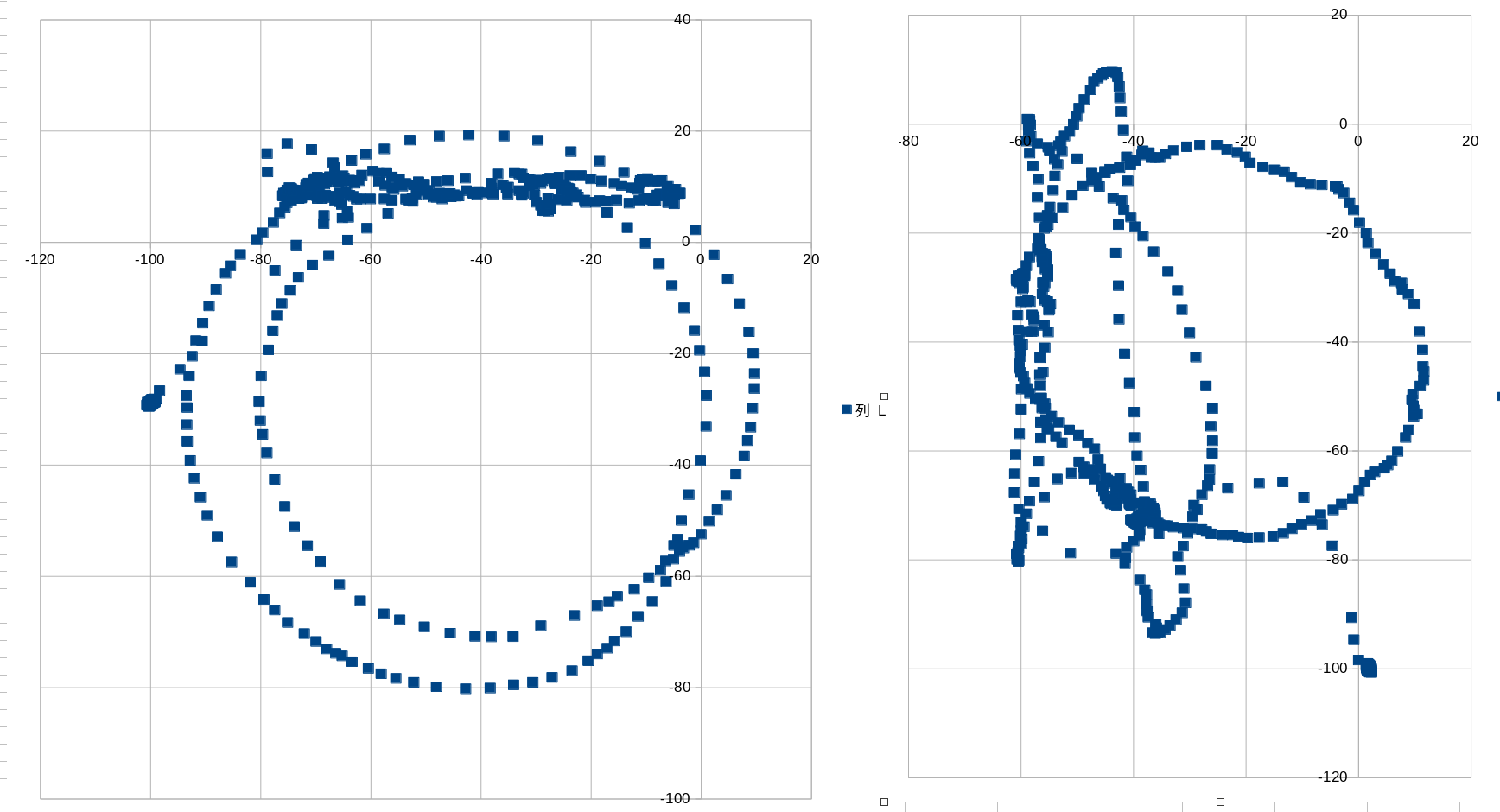 こ
れが観測に入る前に,基板を持って水平と,垂直方向に回転させたときの記録.左がxy平面,右がxz平面とyz平面の軌跡を示す.ただし記録は全回転の記
録になる.これを観ると次に示す前のセンサに比べてとてもきれいな円弧を描いていることがわかる.これだけでもこのセンサの観測値の信頼性が高いことがわ
かる.
こ
れが観測に入る前に,基板を持って水平と,垂直方向に回転させたときの記録.左がxy平面,右がxz平面とyz平面の軌跡を示す.ただし記録は全回転の記
録になる.これを観ると次に示す前のセンサに比べてとてもきれいな円弧を描いていることがわかる.これだけでもこのセンサの観測値の信頼性が高いことがわ
かる.
This is a record of the horizontal and vertical rotations of the substrate before starting the observation. The left image shows the trajectory in the xy-plane, and the right image shows the trajectory in the xz-plane and yz-plane. Note that the recordings are for the entire rotation. This shows that the sensor has drawn a very beautiful arc compared to the previous sensor shown below. This alone shows the high reliability of the observed values.
右手奥の青い基板にArduino+BM1422GMV.別のPCにソフトをインストールした.
Arduino+BM1422GMV on the blue board at the back right.
<参考サイト>
<Reference site>
など多数.
びCopyright(c) by Y.Okamoto 2024, All rights reserved..